Using SLAM for ARLE Mini
ARLE Mini :
ARLE Mini is an autonomous open source robot capable of navigating using RPLidar powered by Intel NUC
ARLE Mini is a miniature version of ARLE(Autonomous Robot for Library Enhancement) being developed for managing books in the institute library of Indian Institute of Technology, Guwahati. ARLE is aimed to be able to navigate autonomously in the library, identify books and racks using RFIDs, pick and place the books in the correct rack using an arm mounted on the bot.
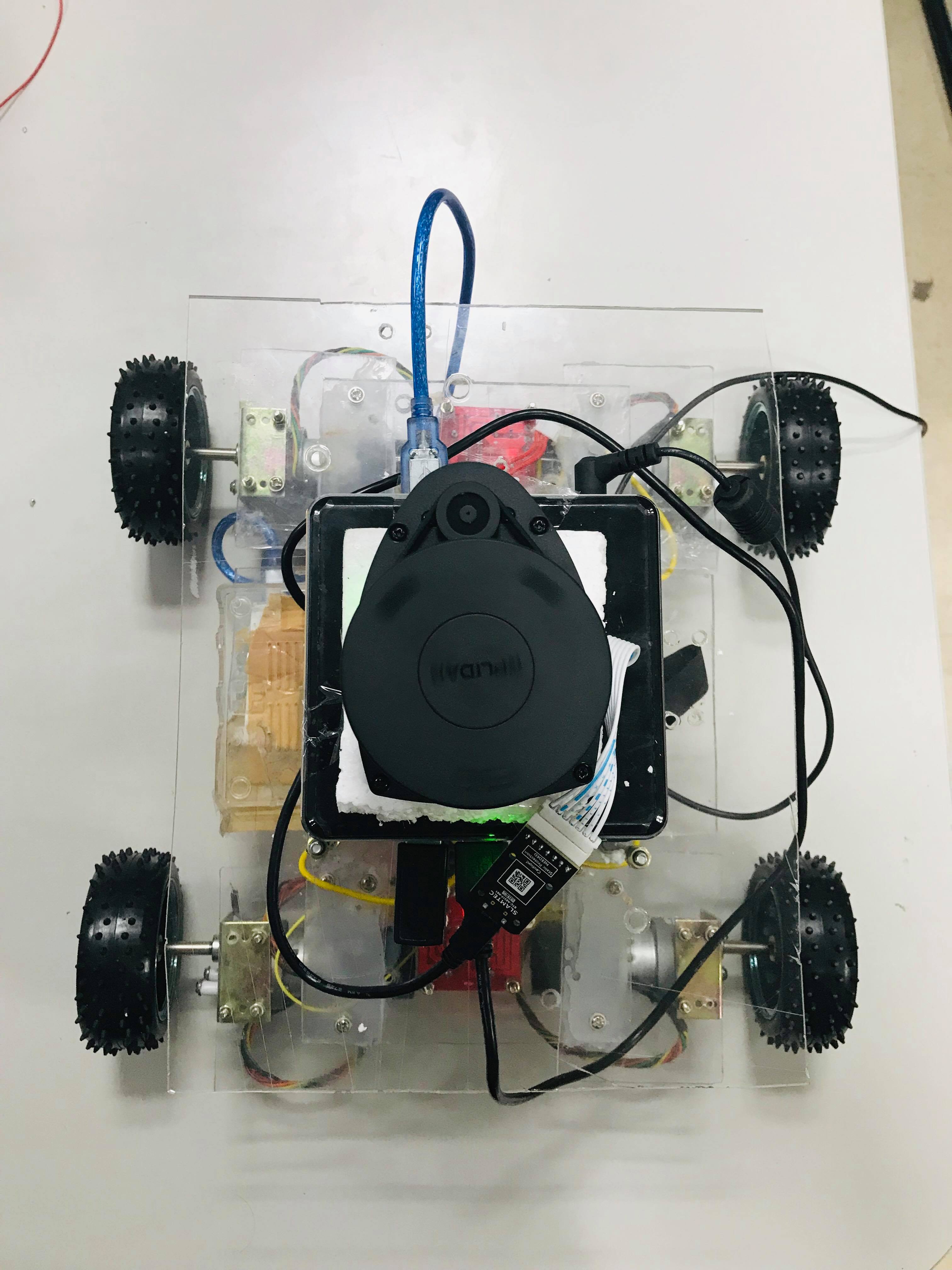
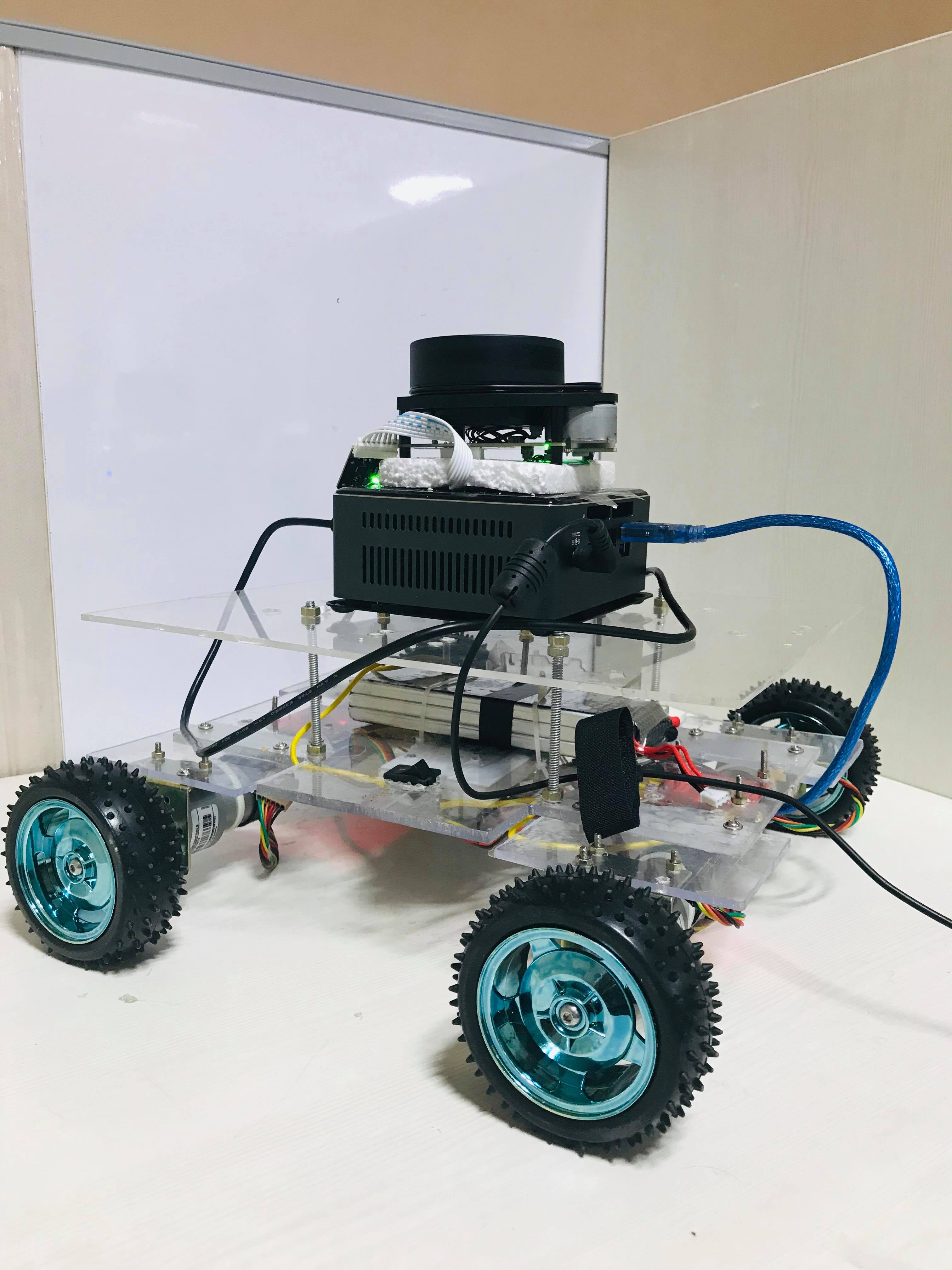
ARLE Mini first build
Modules used for Autonomous Movement
-
Tf (tf2): Coordinate the transform library. It’s one of the most important packages for ROS. Thanks to tf, you can manage all coordinate values, including the position of the robot or relations between the camera and wheels. For treating various categories of coordinates, several distinctive concepts such as frame and tree are adopted.
-
slam_gmapping: ROS wrapper for OpenSlam’s Gmapping. gmapping is one of the most famous SLAM algorithms. While still popular, there are also several alternatives now for this function.
-
move_base: Core module for autonomous navigation. This package provides various functions, including planning a route, maintaining cost maps, and issuing speed and direction commands for motors. Robot_state_publisher. Publishes the 3D poses of the robot links, which are important for a manipulator or humanoid. In the case of SAWR, the most important data maintained by this module is the position and orientation of the robot and the location of the camera relative to the robot’s position.
-
Robot_state_publisher: Publishes the 3D poses of the robot links, which are important for a manipulator or humanoid. In the case of SAWR, the most important data maintained by this module is the position and orientation of the robot and the location of the camera relative to the robot’s position.

SAWR ROS node graph viewed by rqt_graph
Find some useful content on SLAM & Mapping for autonomous robots here